Designation: A.R.T.I 2
Artificial – Robotic – Terrestrial – Intelligence
Name: Aures
Name Meaning: Gold
Wiring Diagram | Code | Video | Gallery
About A.R.T.I 2
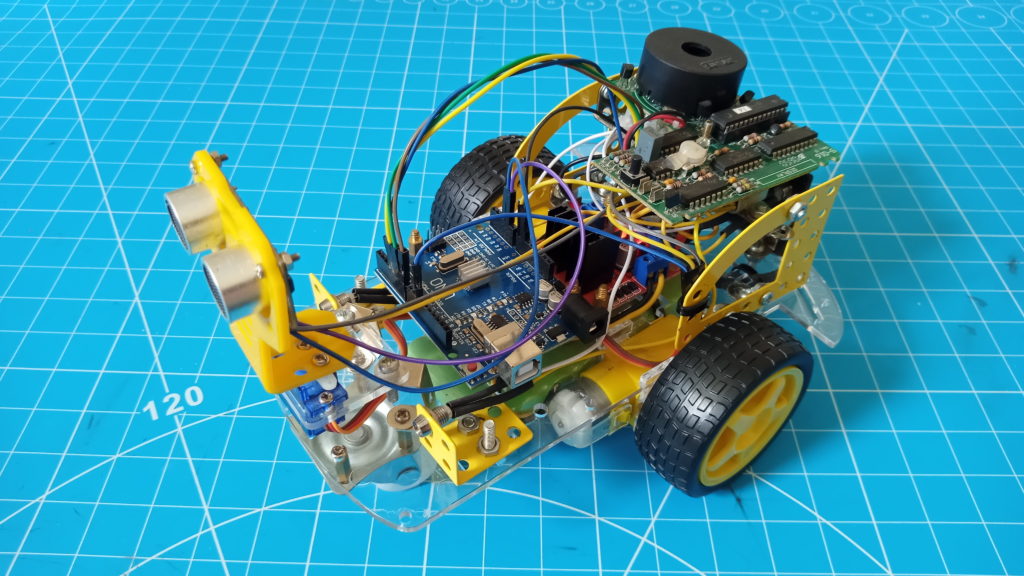
A.R.T.I 2 is the second build of our A.R.T.I robot projects and we decided after finishing number 1, a robot with tracks and a double layer chassis, that we wanted to do something entirely different. We planned to make the next robot useful. It needed to have some utility. She was going to be autonomous just like A.R.T.I 1, so we theorised that with added equipment, we could place this robot into a room, let her go and she could report back to us in some way about the environment in that space; depending on the equipment of course. This robot was named Aures, or ‘Gold’ because of the obvious yellow colour dominating her build.
It turned out that we had some old electronics from a standalone Carbon Monoxide detector, and so this was eventually attached to A.R.T.I 2, and she can now in theory be let off into a room, find her own way around and she will sound an alarm should carbon monoxide be detected.
In practice, this may not be wise. While we researched that Carbon Monoxide could well be detected from the floor, it turns out that due to the instability of her design/the chassis, she is unlikely to be of any use where Carbon Monoxide detection is concerned. A.R.T.I 2 has her mass slightly on and behind the rear axle, and she has quite a bit of torque. Therefore when released she immediately pulls a wheelie. When detecting an obstacle, she will stop, as do the other A.R.T.I robots, reverse slightly, look around, decide on the path of least resistance and go that way. The problem however is that she is so quick, she spins almost all the way around.
Depending on the floor surface she is extremely unpredictable and we have trouble catching her again. We have planned on reducing the power to the wheels via potentiometers, however thus far we have left her as she is, simply because she’s extremely funny.
Our A.R.T.I Robots are not kits. They all use different bought chassis, but they are then built from scratch, by us.
You can find out about our A.R.T.I robot origins: HERE
Full Stats:
Version: 1.0
Designation: A.R.T.I 2
Name: Aures (Gold)
Utility: Carbon Monoxide Detection/Fun
Purpose: Home Education
Weight (total): 780g
SingleTrack Width: 2.5cm
Whole Track Width: 15.6cm
Drive: 2WD (Caster Wheel at Front)
Motor Reduction Ratio: 48:1
Relative Speed (to our other robots): Very Fast
Microcontrollers: 1 x Arduino Uno Boards
Motor Driver: 1 x L298N Dual H Bridge
Servo: 1 x SG90
Sensor: 1 x HC-SR04 Ultrasonic
Sensor Holder: Yellow Acrylic
Switches: 1 x 12v black-anti-vandal switch – Blue LED
LEDs: 4 x in parallel (100ohm resistors) [Yellow Front – Red Rear]
Power, Board 1 (Drive & Secondary Circuits): Regulated 5v from L298N Motor Driver
Power, Motor Driver: 9.6v Ni-MH 2400mAh
Repairs Since Built: Servo (worn)
Program: The robot moves forward by default. When detecting an obstacle less than 20cm away, the robot stops and reverses slightly. It then looks around and measures the distances left and right. It should choose the direction with the most space, turn in that direction and then proceed to move forward by default. It will repeat this programme continuously.
Wiring Diagram Here Soon
Video Here Soon
A.R.T.I 2 – Gallery























